This design is based on the STM32F4 four-axis aerial camera platform. With STM32F407 as the control core, the four-axis aircraft is the carrier, supplemented by the aerial camera system of the PTZ. The hardware consists of flight control circuit, power management, communication module, power system, rack, and PTZ servo system. The algorithm uses simple and stable quaternion plus complementary filtering as the attitude solving algorithm, and PID as the controller to realize the functions of flight and pan-tilt stabilization. It is flexible, light, malleable and adaptable.
1. IntroductionA quadcopter is an aircraft that uses four rotors as a flight engine for aerial flight. Since the beginning of the 20th century, the rapid development of electronic technology has begun to be miniaturized, and incorporates artificial intelligence to make it develop into drones and intelligent robots.
The quadcopter not only realizes the flight performance of the helicopter's vertical lifting, but also reduces the design difficulty of the aircraft mechanical structure to a certain extent. The balance control system of the quadcopter consists of various inertial sensors. In the production process, the center of the overall fuselage, symmetry and motor performance requirements are lower, which is the advantage of making a four-axis aircraft, and compared to the fixed-wing aircraft, the four-axis also has a vertical take-off and landing, Good mobility and easy maintenance.
In practical applications, the quadcopter can perform specific missions in complex and dangerous environments, as well as monitor traffic, the environment, and so on. For example, if a detection device for harmful gases such as methane is installed on a four-axis aircraft, it is possible to detect harmful gases at high altitudes; to enter the radiation area to inspect nuclear facilities; to conduct military reconnaissance; to even carry materials, build houses, and the like. This design utilizes a four-axis pan/tilt to realize aerial photography tasks, and of course, it can perform other tasks after modification.
This design mainly studies the attitude settlement and flight control of the quadcopter, and designs and manufactures a four-axis aircraft, calibrates the key sensors, and uses matlab to analyze the data, design the algorithm, and also conducts single-channel balance test debugging. The test flight experiment has achieved certain results.
2. System solutionThis design uses STM32F4 as the core processor. The processor core architecture ARM Cortex-M4 features high performance, low cost and low power consumption.
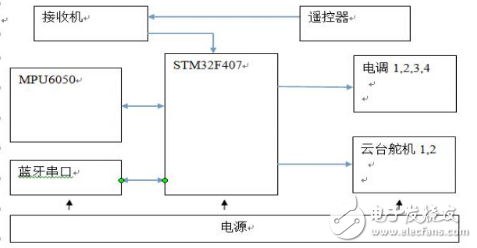
The main control board includes the sensor MPU6050 circuit module, wireless Bluetooth module, motor start module, power management module, etc.; remote control uses commodity remote control and receiver. The control chip captures the PPM command signal of the receiver, and the IIC bus is connected between the sensor and the control chip, and the control signal is transmitted by the PWM between the MCU and the ESC.
The software algorithm uses the quaternion-based complementary filter to solve the pose, and the control algorithm uses the classic PID controller to control the PTZ servo and the four-axis motor. Figure 2-1 shows the overall block diagram of the design.
 3. System hardware design
3. System hardware design In response to the overall design proposed above, the design adopts a modular strategy, and the various functional parts are designed and finally combined.
3.1 Power Management ModuleThe quadcopter requires the overall design to be lighter in weight and smaller in size. Therefore, in the selection of the battery, it is most suitable to use a lithium battery that is small in size, light in weight, and large in capacity. The core chip of the system is STM32F103. The common working voltage is 3.3V. At the same time, the inertial measurement sensor, the conventional power supply voltage of the Bluetooth communication module is also 3.3V, and the voltage of the lithium battery is 11.4V. To make the system work normally, it needs to be 11.4V. The lithium battery voltage is regulated to 3.3V. The commonly used 78 series regulator chip is no longer suitable, and a better performance regulator chip must be selected.
After comprehensive consideration, this circuit uses the core chip of the LM1117-3.3 and LM2940-5 power supply parts. The battery power is reduced to 5V after the LM2940-5 is regulated to 3.3V at the input LM1117-3.3. Due to the large current of the motor part, overcurrent protection is added to the flight control circuit section, and a 500 mA fuse is used. The circuit diagram is as follows.
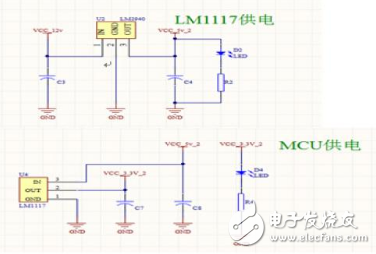
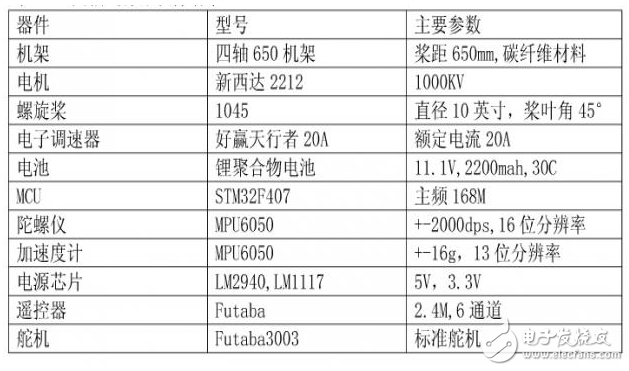
Table 3-1 List of four-axis aircraft hardware
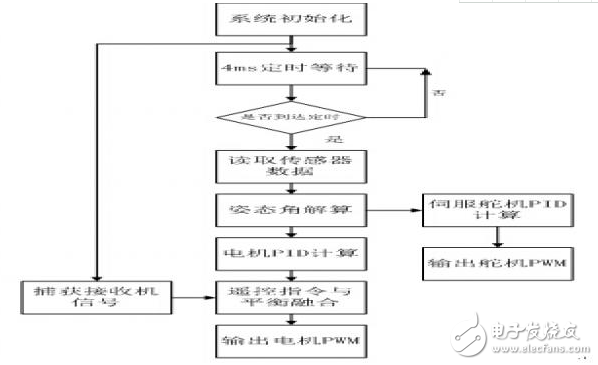
In the software design, the sensor core STM32F4 reads the sensor information, solves the attitude angle, and integrates the remote control information with the attitude angle as the controlled amount, and outputs it to four motors and two servos to complete the four-axis flight control and the stability of the pan/tilt. make up. The following picture shows the software process:
4.1. Implementation of Four Elements Calculating Attitude Angle
According to the attitude given above, the equation and the quaternion are solved, and the calculation principle of the attitude calculation system can be obtained as shown in the following figure (4-1).
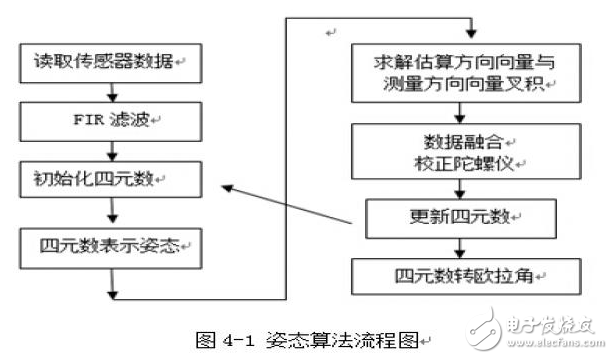
The design is based on the four-element algorithm completed by the idea of ​​complementary filtering. The core idea is to use the gravity vector measured by the acceleration and the estimated attitude to obtain the gravity vector error to correct the gyroscope integral error, and then use the corrected gyroscope integral to obtain the attitude. angle.
Litz Wire Typical applications are: high frequency inductor, transformer, frequency converter, fuel cell, the horse, communication and IT equipment, ultrasound equipment, sonar equipment, televisions, radios, induction heating, etc.In 1911, New England became the first commercial manufacturer in the United States to produce the Leeds line.Since then, New England has remained the world leader in providing high-performance Leeds line products and solutions to customers around the world.It is also transliterated as the "litz line".

Litz Wire,Copper Litz Wire,Copper Transformer Litz Wire,High Temperature Litz Wire
YANGZHOU POSITIONING TECH CO., LTD. , https://www.cnpositioning.com