An old-fashioned fall detection device based on single-chip microcomputer is designed, which uses acceleration and gyro sensor to collect the original signal. The adaptive complementary filtering algorithm is used in data fusion to eliminate noise from the frequency domain. A fall calculation algorithm with small calculation amount is designed for the device, and a GPS positioning device and a GSM short message module are added. Experiments show that the fall detection algorithm has a small amount of calculation, low false positive rate, and can achieve accurate positioning.
Studies have shown that the incidence of falls in the elderly is high and the consequences are serious, which is the first cause of death for the elderly. Moreover, the probability of a fall increases with age, and if it can be rescued in time, it can effectively reduce the mortality rate of the elderly.
At present, there are two main technologies for research and development of human fall detection systems: image analysis and acceleration analysis. Based on the image analysis method, the accuracy is high, but the detection algorithm is cumbersome, high in cost, and inconvenient to carry. Based on the acceleration analysis method, it is not only low in cost, but also free from environmental constraints, low in power consumption and easy to carry.
1 system overall design
This design uses the six-axis gyroscope accelerometer MPU6050 to collect the original signal, the sampling frequency is 100 Hz. When performing the attitude calculation, the complementary filter is used for filtering, and the three-axis acceleration signal is preprocessed to introduce the combined acceleration. In order to eliminate interference, accurately detect the fall, and use the attitude angle and the synthetic acceleration as feature quantities, a three-level fall detection algorithm is introduced. Once the fall is detected, the position of the old man is immediately positioned and the flash fires. After waiting for 30 s, if the user does not manually cancel the alarm, the buzzer will sound and send an alarm message to the target mobile phone and 120. The system also sets a one-button alarm function. The user's family can obtain the current location information of the elderly by sending a text message to the device to prevent the elderly from being lost.
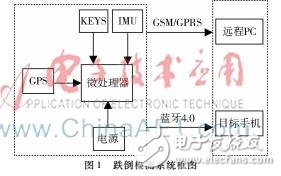
The hardware of the system mainly includes InerTIal Measurement Unit (IMU), GSM/GPRS module, GPS positioning module, Bluetooth 4.0 module, controller with STM32F103ZET6 as the core, power module, buttons and so on. The structural block diagram of the system is shown in Figure 1.
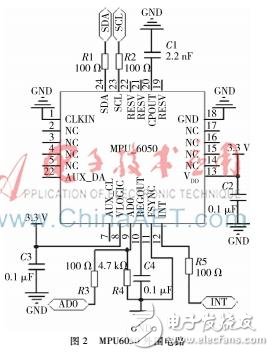
The inertial measurement unit uses InvenSense's MPU6050 chip, which can simultaneously detect three-axis acceleration and three-axis angular velocity, and can output digital quantities, and the measurement range of the sensor is optional. The measurement range of the acceleration sensor is selected to be ±8 g, and the measurement range of the gyroscope is selected to be ±1 000 dps, which can meet the requirements of the system. Its peripheral circuit is shown in Figure 2. The use of the digital motion processor inside the chip for attitude calculation greatly reduces the difficulty of development.
The GPS positioning module uses UBOX's NEO-6M module, which is small in size, low in power consumption, powerful in star search, and can be connected to various active antennas, making it ideal for portable devices.
The GSM/GPRS module uses SIMCOM's industrial-grade quad-band SIM800 chip to enable low-power voice and data transmission. The user can use the AT command to dial the number, receive the SMS, and start the GPRS network.
The Bluetooth 4.0 module uses the Bluetooth module of the HM-13 series. One of the most advantageous aspects of data transmission with Bluetooth is low power consumption. Low-power Bluetooth technology dramatically reduces system power consumption, requiring only a coin-sized battery to keep the system up and running for months, making it ideal for portable applications.
The main function of the button is to provide manual alarm and manual cancel alarm to reduce the loss of the system and the user's loss, and also set a one-button alarm function.
2 fall detection algorithm
2.1 eigenvalue preprocessing
The accelerations of the X-axis, Y-axis, and Z-axis measured by the acceleration sensor during motion are a2x, a2y, and a2z, respectively. The resultant acceleration is the sum of squares of the three-axis acceleration and re-opening. The magnitude of the combined acceleration can characterize the intensity of human motion.
2.2 attitude solution
When the data is solved, the human body attitude angle is obtained by integrating the angular velocity, and the precision is high in a short time, but the gyroscope has a drift error, and after the integral operation, it becomes an accumulation error, and finally the circuit is saturated. Instead of using acceleration to solve the attitude angle, the measurement error does not increase with time accumulation. However, the acceleration sensor will bring white noise to the measurement when the human body moves, and the accuracy is low in a short time.
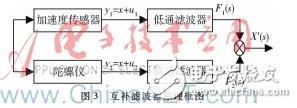
According to the above analysis, the acceleration sensor has a good dynamic response in the low frequency band, but does not perform well in the high frequency band. The gyroscope has good dynamic response, but there is drift error. Therefore, adaptive data filtering is used to eliminate noise from the perspective of the frequency domain, and to exert their respective advantages and output a stable and reliable attitude angle. The block diagram of the complementary filter is shown in Figure 3.
Semi-Automatic Washing Machine Spin Motor
Semi-Automatic Washing Machine Spin Motor,Motor For Wash Machine,Al Wire Spin Motor,Semi Automatic Washing Machine Dryer Motor
WUJIANG JINLONG ELECTRIC APPLIANCE CO., LTD , https://www.jinlongmotor.com