In general isolated power supplies, optocoupler isolation feedback is a simple, low-cost way. However, for the various connection methods of optocoupler feedback and their differences, no in-depth research has been seen yet. Moreover, in many occasions, because the understanding of the working principle of the optocoupler is not deep enough, the optocoupler connection method is confusing, which often causes the circuit to fail to work normally. This study will analyze the working principle of optocoupler in detail, and compare several typical methods of optocoupler feedback.
Common connection methods and how they work
The optocoupler models commonly used for feedback are TLP521, PC817, etc. Here, the TLP521 is taken as an example to introduce the characteristics of such an optocoupler. The primary side of the TLP521 is equivalent to a light-emitting diode. The larger the primary current If, the stronger the light intensity, and the larger the current Ic of the secondary transistor. The ratio of the secondary triode current Ic to the primary diode current If is called the current amplification factor of the optocoupler, which varies with temperature and is greatly affected by temperature. The optocoupler used for feedback uses the "primary current change will cause the secondary side current to change" to achieve feedback. Therefore, in the case of severe changes in ambient temperature, since the temperature drift of the amplification factor is relatively large, it should be achieved without optocoupler. Feedback. In addition, the use of such optocouplers must pay attention to the design of peripheral parameters, so that it works in a relatively wide linear band, otherwise the circuit is too sensitive to operating parameters, which is not conducive to the stable operation of the circuit.
Feedback is usually selected in conjunction with TLP521. At this time, the working principle of the TL431 is equivalent to a voltage error amplifier with an internal reference of 2.5V, so between the 1st and 3rd feet, the compensation network should be connected.
The common optocoupler feedback is the first connection, as shown in Figure 1. In the figure, Vo is the output voltage and Vd is the supply voltage of the chip. The com signal is connected to the error amplifier output pin of the chip, or the internal voltage error amplifier of the PWM chip (such as UC3525) is connected to the non-inverting amplifier form, and the com signal is connected to its corresponding non-inverting terminal pin. Note that the ground on the left is the output voltage ground, and the ground on the right is the power supply voltage of the chip. The two are isolated by optocouplers.
The operation of the connection shown in Figure 1 is as follows: When the output voltage rises, the voltage of pin 1 of the TL431 (corresponding to the inverting input of the voltage error amplifier) ​​rises, and the voltage of pin 3 (corresponding to the output pin of the voltage error amplifier) Decrease, the primary current If of the optocoupler TLP521 increases, the output current Ic of the other end of the optocoupler increases, the voltage drop across the resistor R4 increases, the com pin voltage decreases, the duty cycle decreases, and the output voltage decreases; Conversely, when the output voltage is reduced, the adjustment process is similar.
A common second connection is shown in Figure 2. Different from the first connection method, the fourth pin of the optocoupler in the connection is directly connected to the error amplifier output end of the chip, and the voltage error amplifier inside the chip must be connected to the non-inverting terminal potential higher than the inverting terminal potential. The form, using one of the characteristics of the op amp - when the output current of the op amp is too large (beyond the op amp current output capability), the output voltage value of the op amp will decrease, and the larger the output current, the more the output voltage drops. Therefore, in this circuit, the two input pins of the error amplifier of the PWM chip must be connected to a fixed potential, and the potential of the same terminal should be higher than the potential of the opposite terminal to make the initial output voltage of the error amplifier. High.
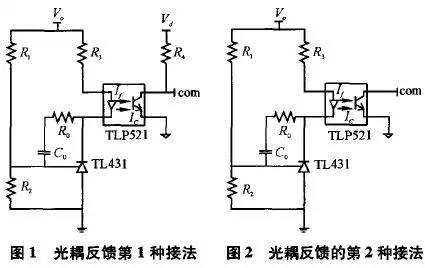
The working principle of the connection method shown in Figure 2 is: when the output voltage rises, the primary current If increases, and the output current Ic increases. Since Ic has exceeded the current output capability of the voltage error amplifier, the com pin voltage drops. The air ratio is reduced and the output voltage is decreased; conversely, when the output voltage is decreased, the adjustment process is similar.
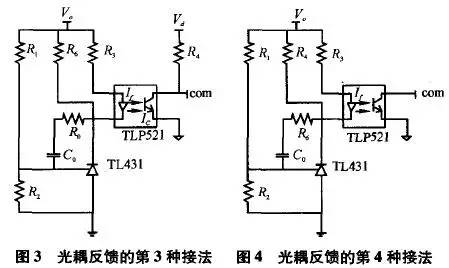
A common third connection is shown in Figure 3. Similar to Figure 1, the difference is that there is a resistor R6 in Figure 3. The resistor is used to inject an additional current into the TL431 to prevent the TL431 from working properly due to too small injection current. In fact, if the resistance value R3 is appropriately selected, the resistor R6 can be omitted. The adjustment process is basically the same as that of Figure 1.
A common fourth connection is shown in Figure 4. The connection method is similar to the second connection method. The difference is that a resistor R4 is connected between the com terminal and the photocoupler pin 4, and its function is consistent with R6 in the third connection method, and the working principle is basically the same. 2.
Comparison of various connections
Before the comparison, several characteristic curves of the actual optocoupler TLP521 need to be analyzed. The first is the Ic-Vce curve, as shown in Figure 5 and Figure 6.
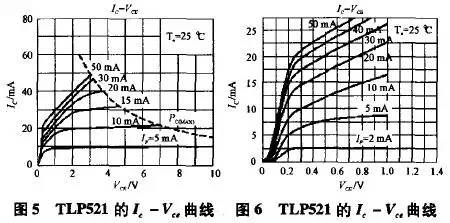
It can be seen from FIG. 5 and FIG. 6 that when If is less than 5 mA, a small change of If will cause a sharp change of Ic and Vce, and an output characteristic curve of the optocoupler is gentle. At this time, if the optocoupler is used as part of the power feedback network, the transfer function gain is very large. For the whole system, a very high gain is easy to cause system instability, so it is not appropriate to set the quiescent operating point of the optocoupler to a current If less than 5 mA, and it is appropriate to set it to 5 to 10 mA.
In addition, the Ic-If curve of the optocoupler needs to be analyzed, as shown in Figure 7.
As can be seen from Fig. 7, when the current If is less than 10 mA, Ic-If is substantially unchanged, and after the current If is greater than 10 mA, the optocoupler begins to become saturated, and the value of Ic-If decreases as the If increases. For a power system, if the gain of the loop is changed, it may cause instability, so it is unreasonable to set the static operating point to too large (so that the output characteristics are easily saturated). It should be noted that the Ic-If curve changes with temperature, but the temperature change affects the Ic value at a fixed If value, and has no effect on the Ic-If ratio. The shape of the curve remains the same as in Figure 7, except that As the temperature rises, the curve as a whole moves down. This characteristic can be seen from the Ic-Ta curve (shown in Figure 8).
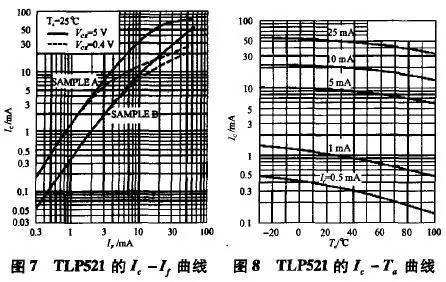
As can be seen from Fig. 8, when If is greater than 5 mA, the Ic-Ta curves are substantially parallel to each other.
Based on the above analysis, the following is a comparison of the characteristics and the scope of application for different typical connections. This study uses an actual isolated half-bridge auxiliary power supply and a flyback power supply as an example.
In the first connection method, the voltage connected to the output terminal of the voltage error amplifier is obtained after the external voltage is stepped down by the resistor R4, and is not affected by the current output capability of the voltage error amplifier. The working point of the optocoupler can be adjusted freely through its external resistor.
According to the previous analysis, the static working point value of the current If is about 10 mA, and the corresponding optocoupler operating temperature is changed from 0 to 100 ° C, and the value is between 20 and 15 mA. Generally, the amplitude of the triangular wave of the PWM chip does not exceed 3V. Therefore, the size of the selected resistor R4 is 670Ω, and at the same time, the static working point value of the 3-pin voltage of the TL431 is determined to be 12V, then the value of the resistor R3 can be selected to be 560Ω. The values ​​of the resistors R1 and R2 are easily selected, and are taken here as 27k and 4.7k. Resistor R5 and capacitor C1 are PI compensated, here taken as 3k and 10nF.
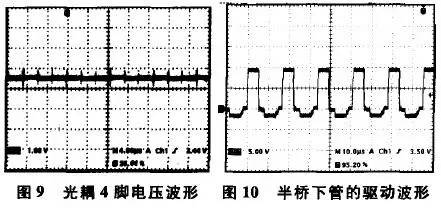
In the experiment, the half-bridge auxiliary power output load is the various control chips on the control board, plus the dead load of each of the multiple outputs, the final actual power is about 30w. The actual measured optocoupler 4 pin voltage (this voltage is compared with the chip triangle wave to determine the drive duty cycle) waveform, as shown in Figure 9. The corresponding drive signal waveform is shown in Figure 10.
The driving waveform of Fig. 10 has a negative voltage portion because the driving of the upper and lower tubes is wound around a driving magnetic ring. It can be seen that the duty cycle of the drive signal is relatively large, about 0.7.
For the second connection method, the voltage error amplifier inside the general chip has a maximum current output capability of about 3 mA. When this current value is exceeded, the maximum voltage of the error amplifier output will drop. Therefore, in this connection method, if the steady-state duty ratio of the power supply is large, the current Ic is relatively small, and its value may be only slightly larger than 3 mA, corresponding to FIG. 7, Ib is about 2 mA. It can be seen from Fig. 6 that when the Ib value is small, a slight Ib change will cause a sharp change of Ic, and the gain of the optocoupler is very large, which will result in the closed loop network not being easily stabilized. However, if the steady-state duty cycle of the power supply is relatively small, the voltage of the 4-pin of the optocoupler is relatively small, and the output current of the corresponding voltage error amplifier is large, that is, Ic is relatively large (far greater than 3 mA), and the corresponding Ib is also relatively large, and the same Corresponding to FIG. 6, when the Ib value is large, the corresponding optocoupler gain is relatively moderate, and the closed-loop network is relatively easy to stabilize.
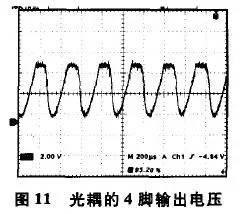
Similarly, for the above half-bridge auxiliary power supply circuit, the connection method 2 is used instead of the connection method 1, the closed-loop is unstable, and the voltage waveform of the photocoupler 4 pin is observed by an oscilloscope, and there is obvious oscillation. The 4-pin output voltage of the optocoupler (corresponding to the error amplifier output pin voltage of the UC3525), the waveform is shown in Figure 11, and significant oscillations can be found. This is because the steady-state duty ratio of this half-bridge power supply is relatively large. When the connection method is 2, the optocoupler gain is large, and the system is unstable and oscillates.
In fact, the second type of connection is more common in the flyback circuit. This is because the flyback circuit is generally considered for efficiency. The circuit usually works in the discontinuous mode, and the driving duty ratio is relatively small. The corresponding optocoupler current Ic is compared. Large, referring to the above analysis, the closed loop is also relatively easy to stabilize.
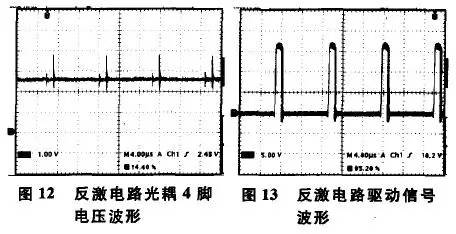
The following is another experimental flyback circuit that works in discontinuous mode and actually measures the voltage waveform of its optocoupler 4 pin, as shown in Figure 12. The actual measured drive signal waveform, as shown in Figure 13, has a duty cycle of approximately 0.2.
Therefore, in the optocoupler feedback design, in addition to setting its peripheral parameters according to the characteristic parameters of the optocoupler, it should also be known that the selection of the feedback mode at different duty cycles is also limited. Feedback modes 1, 3 are suitable for any duty cycle, and feedback modes 2, 4 are more suitable for use in situations where the duty cycle is relatively small.
summary
This study lists four typical optocoupler feedback connections, analyzes the principle of optocoupler feedback under various connections and various limiting factors, and compares the different points of various connections. Through the actual half-bridge and flyback circuit test, the limitation of the duty cycle of the circuit operation to the feedback mode selection is verified. Finally, the optocoupler feedback is summarized, which has certain reference value for future optocoupler feedback design.
Aluminum Zinc Alloy Die Casting Blank
Aluminum Zinc Alloy Die Casting Blank,Metal Structure Zinc Casting,Custom Made Precision Die,Zinc Aluminum Alloy Casting
Dongguan Metalwork Technology Co., LTD. , https://www.diecast-pro.com